
Um artigo publicado na revista científicaIEEE Transactions on Robotics descreve o estudo de pesquisadores chineses para o desenvolvimento de um rato-robô que, no futuro, pode realizar tarefas como procurar sobreviventes em locais de desastres ou fazer inspeções em áreas de difícil acesso.

Cientistas no mundo afora já criaram robôs exploradores de espaço apertado baseados em cobras e baratas, mas os ratos também são altamente adeptos a se espremer através de aberturas estreitas e atravessar terrenos irregulares. Pensando nisso, uma equipe liderada pelo professor Qing Shi, do Instituto de Tecnologia de Pequim da China, projetou o SQuRo.
Embora o nome possa soar mais para “esquilo robótico”, ele é na verdade a sigla de “rato robótico quadruplicado de pequeno porte”.
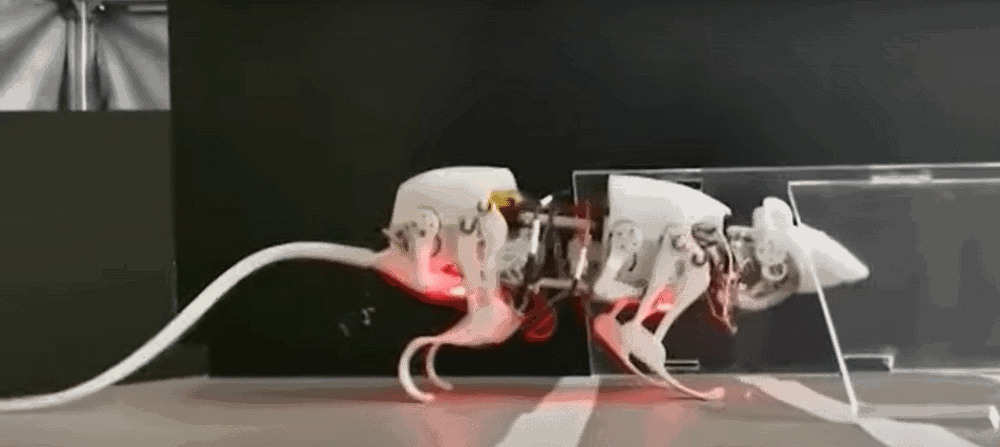
Com base no tamanho do corpo e na forma do rato norueguês (rattus norvegicus), o robô tem dois graus de liberdade em cada uma de suas quatro pernas, duas em sua cintura e duas em sua cabeça. Essa configuração replica a longa coluna flexível do rato real, permitindo que o robô dobre rapidamente seu corpo e se vire.
Um artigo publicado na revista científicaIEEE Transactions on Robotics descreve o estudo de pesquisadores chineses para o desenvolvimento de um rato-robô que, no futuro, pode realizar tarefas como procurar sobreviventes em locais de desastres ou fazer inspeções em áreas de difícil acesso.
Cientistas no mundo afora já criaram robôs exploradores de espaço apertado baseados em cobras e baratas, mas os ratos também são altamente adeptos a se espremer através de aberturas estreitas e atravessar terrenos irregulares. Pensando nisso, uma equipe liderada pelo professor Qing Shi, do Instituto de Tecnologia de Pequim da China, projetou o SQuRo.
Embora o nome possa soar mais para “esquilo robótico”, ele é na verdade a sigla de “rato robótico quadruplicado de pequeno porte”.
Com base no tamanho do corpo e na forma do rato norueguês (rattus norvegicus), o robô tem dois graus de liberdade em cada uma de suas quatro pernas, duas em sua cintura e duas em sua cabeça. Essa configuração replica a longa coluna flexível do rato real, permitindo que o robô dobre rapidamente seu corpo e se vire.
SQuRo tem um raio de giro mínimo de apenas 0,48 do comprimento do corpo, que é supostamente muito menor do que o de outros robôs quadrúpedes de uma escala semelhante.
Ele também é considerado mais fino e mais leve do que os demais, pesando 220 g, o que lhe permite transportar até 200 g de carga, como câmeras ou outros sensores.
Além disso, o robô é capaz de se corrigir após cair, se espremer através de passagens irregulares tão estreitas quanto 90 mm, ultrapassar obstáculos de até 30 mm de altura e manter a locomoção estável enquanto sobe uma inclinação de 15 graus.
Seus movimentos são controlados por um microprocessador a bordo, que alterna automaticamente entre quatro modos básicos de movimento com base na força de reação do solo detectada – definida como “a força exercida pelo chão em um corpo em contato com ele”.
Olhar Digital